
arduinoでサーボモーターを制御してみました。備忘録です。
電子工作でよく使われるものにArduinoがあります。今回はその互換品ELEGOOを使用してサーボモーターを回してみました。
準備物
- サーボモーター(Micro Servo SG90)
- ELEGOO
- ジャンパーワイヤー
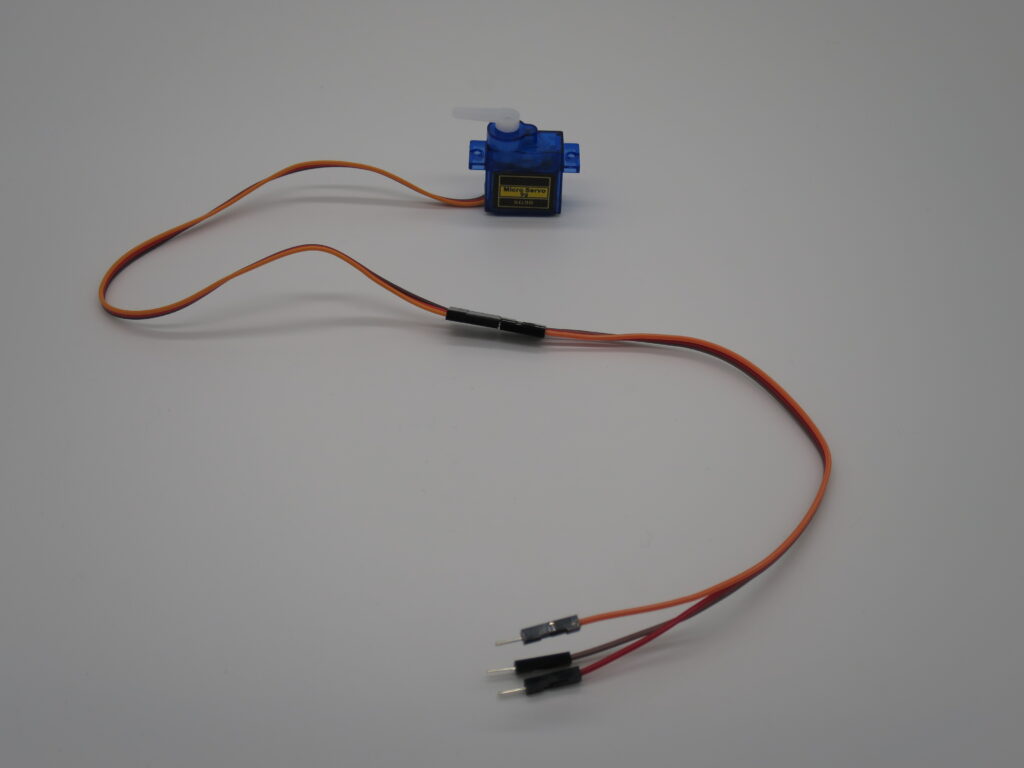
サーボモーターから出ている線は端部がメスなので、まず、下の画像のようにオスのジャンパー線と結線します。

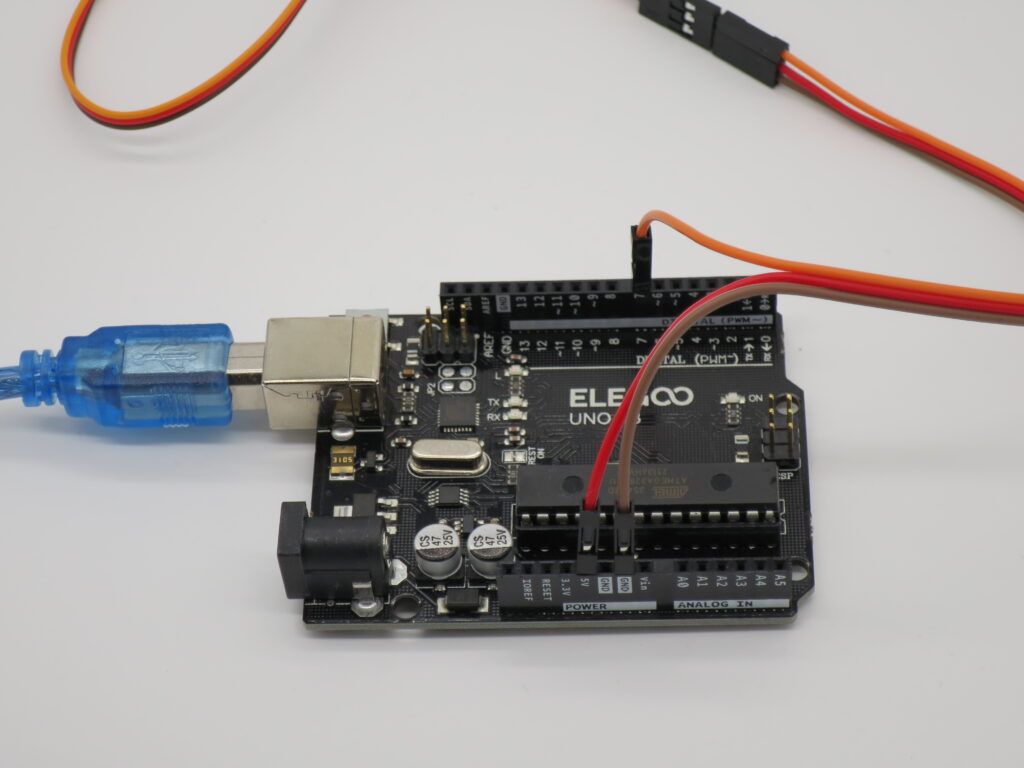
次に、ELEGOOに接続していきます。ジャンパー線の3つの端部(画像ではオレンジ、赤、茶の線の端部)を画像のようにオレンジを7番ピン、赤を5Vピン、茶をGNDピンにつなげます。
GNDはGround(グラウンド)の略であり、0Vの基準点を示してくれるピンです。オレンジの線がつながっている部分(1,2,3…等番号が振ってある部分)をデジタルピンというのですが、デジタルピンから電圧をかけるときは、このGNDピンに結線して、回路を作ります。
最終的に、このように配線できれば完成です。
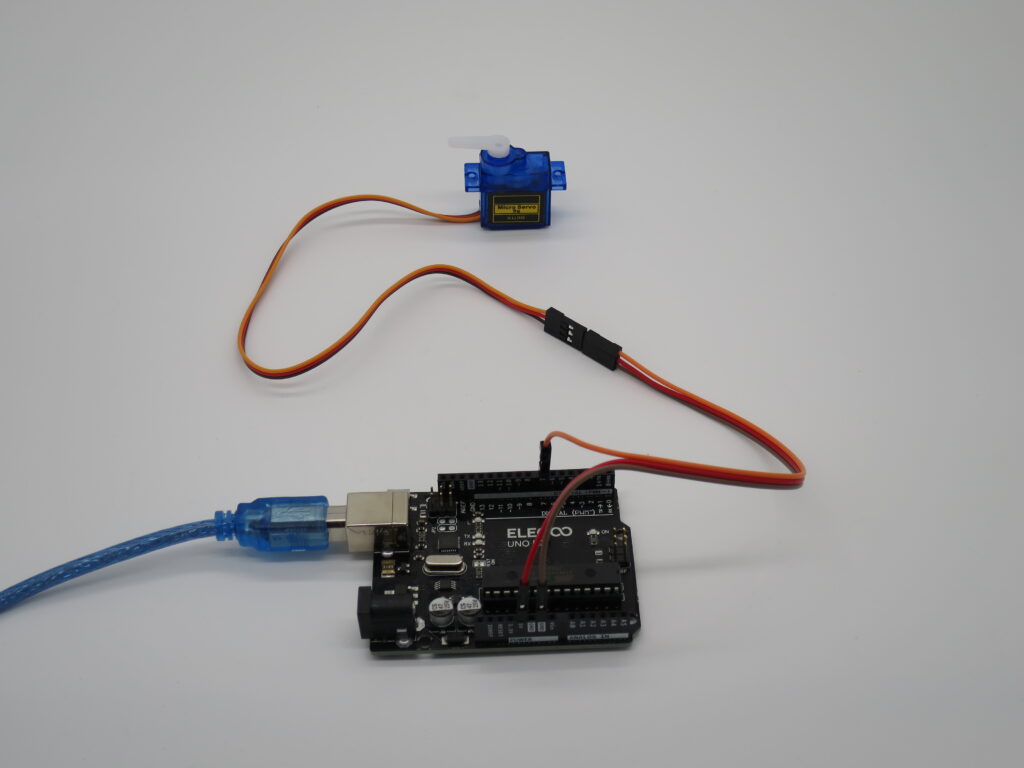
PCとELEGOOをUSBケーブルでつなぎ通電すれば、動きます。
が、その前にELEGOOにコードを書き込む必要があります。今回は記事の最後に記載してあるものを使用しました。
そして実際に動かしたときの動画がこちらになります。
PCとELEGOOをUSBケーブルでつなぎ通電すれば、動きだします。動かなかったものが動くと気持ちが良いですね。
ではまた。
使ったArduinoのコードはこちら↓
#include <Servo.h> // Include Servo library
Servo myservo;
const int SV_PIN = 7; // Set the servo motor to digital pin 7
void setup(){
myservo.attach(SV_PIN);
}
void loop(){
myservo.write(0); // Move the servo motor to the 0 degree position
delay(1000);
myservo.write(90); // Move the servo motor to the 90 degree position
delay(1000);
myservo.write(180); // Move the servo motor to the 180 degree position
delay(1000);
}